高识官微


抓拍原理
双目摄像头和补光灯安装在高6~7m的交警电警杆件上,依据【GB/4785-2019和JJG745-2016】远光灯和近光灯基准中心光轴偏移量的差异及远近光照射距离和角度的不同,对进入180米-25米视域内车辆前照灯角度、光束阈值和运动轨迹进行数学计算,持续跟踪并判定同一车辆持续开启远光灯,二次比对远光灯模型数据库眩目度阈值。
智能区分跟车、会车、城市禁远违法场景,生成一车牌一视频四图片的违法证据链,上传执法平台。
证据展示
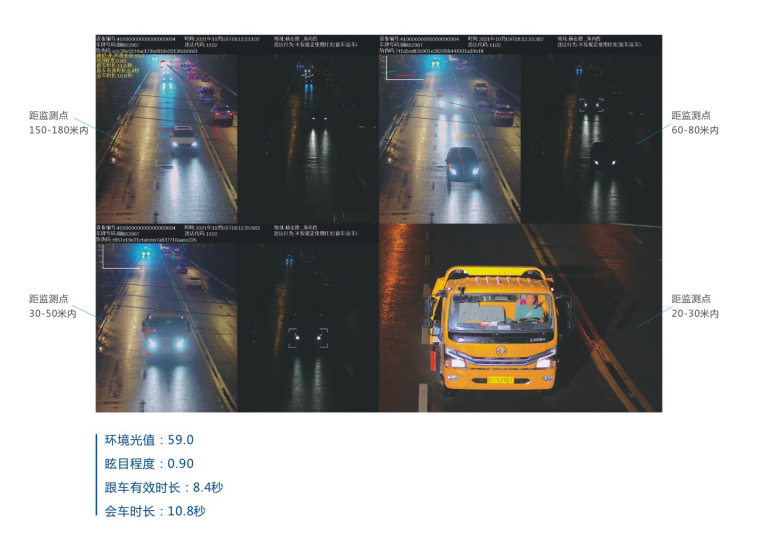
持续跟踪——全程记录车辆运行轨迹,证明车辆的唯一性和抓拍精准性
l 采用卡尔曼滤波预测实时跟踪技术,四个车辆位移位置四张抓拍图片,全程记录车辆运行轨迹,光晕眩目,暗帧图片灯型清晰,证明了车辆的唯一性和抓拍的准确性。

车距标识-证据确凿,有理有据
l 系统实时显示跟车距离、跟车时间,完全满足最新行业标准中对于车距参考标识的要求

自动过滤-自动过滤环境光干扰、因警示而短暂使用远光灯等合理行为,杜绝误拍
l 系统能够感知环境光值,有效避免因路灯、路面凹凸不平、反光、周围车灯等环境光的干扰,杜绝误拍。
l 过滤因警示而短暂使用远光灯等合理行为。
l 保留不按规定使用远光灯的有效数据。

眩目度分析-二次分析,规范执法,提效节能
l 基于深度学习的数据库实时更新二次比对技术,数据审核时,选择眩目度大于0.85且光晕眩目的数据,既能保证执法的准确性,又体现人性化执法。


 豫公网安备41010702004809号
郑州高识智能科技有限公司 联系邮箱:gaoshizhineng@163.com 联系地址:河南省郑州市郑东新区崇德街19号中原数据产业大厦17层 远光灯抓拍设备公司
远光灯抓拍设备公司
汽车远光灯
视觉传感器的作用
豫公网安备41010702004809号
郑州高识智能科技有限公司 联系邮箱:gaoshizhineng@163.com 联系地址:河南省郑州市郑东新区崇德街19号中原数据产业大厦17层 远光灯抓拍设备公司
远光灯抓拍设备公司
汽车远光灯
视觉传感器的作用 
